Light-Finding Robot
For class, we had to prototype and build an autonomous robot car that could make its way around a maze toward a source of light. The primary issues were light detection and collision detection and there were size and material restraints.
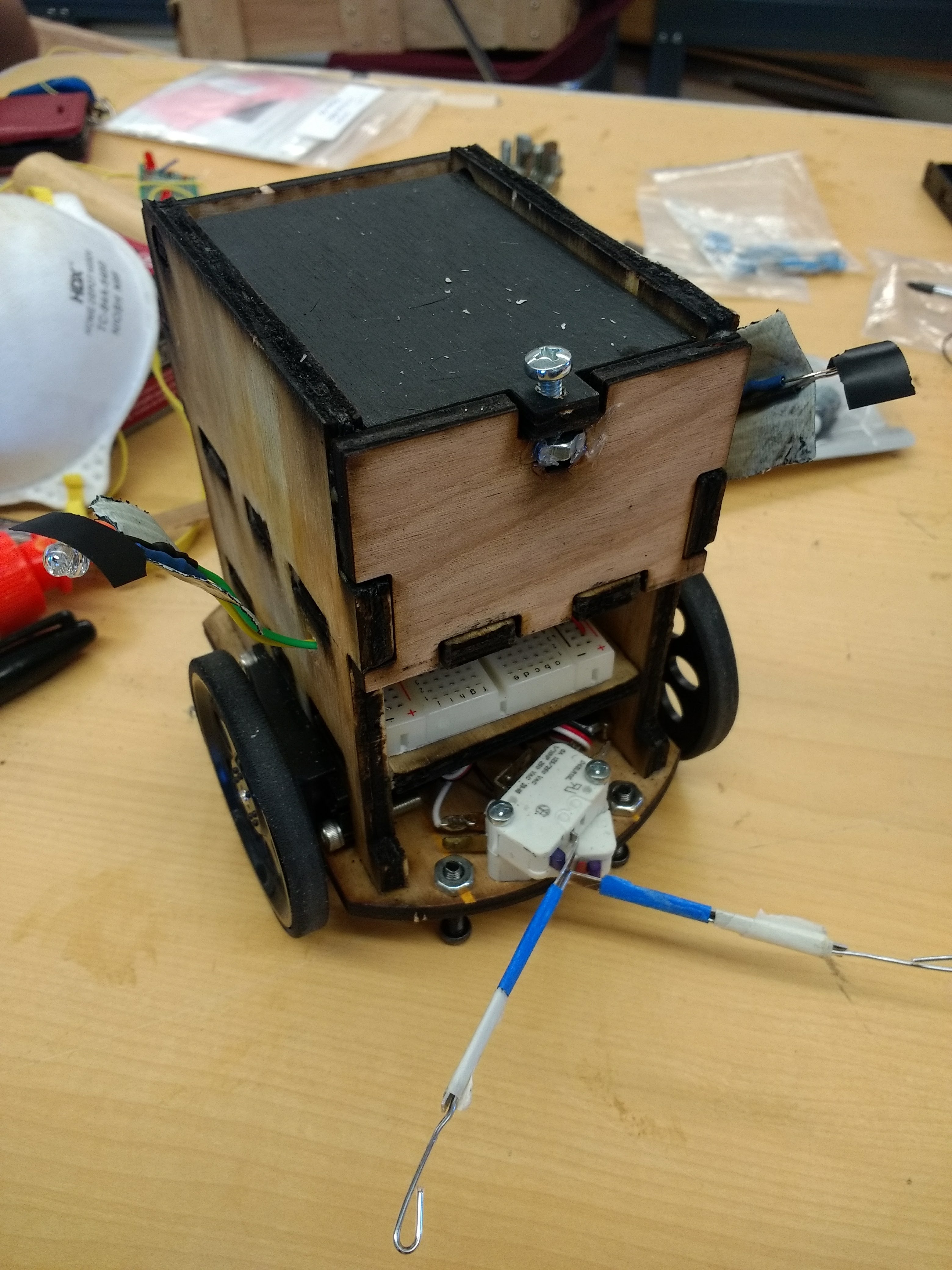
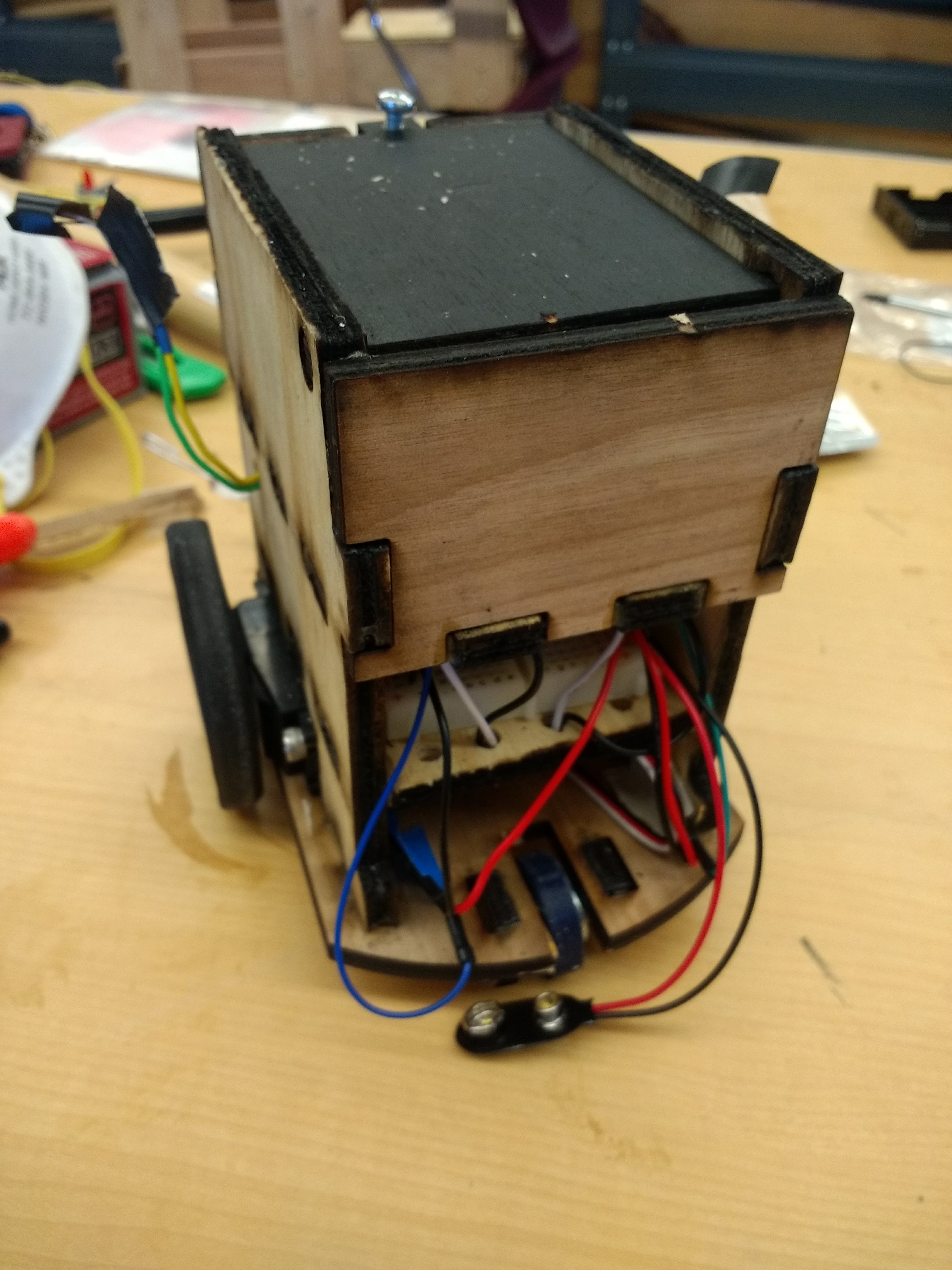
For collisions with parts of the maze, I wanted to be able to easily turn on the spot, so I used two motorized large wheels with a small caster wheel in the back to stay balanced. I also designed my car to be centralized (as in not long in one direction) to help with the turning, and this led me to built upward to have room for a breadboard and Arduino. So, I designed the frame, lasercut it out of plywood, and glued it together. I used two continuous rotation servos to drive the wheels, as I was more concerned about maneuvering through the maze than speed.
To detect collisions in the maze, I extended the reach of two limit switches that would be activated if the robot car drove forward into something. For light detection, I attached two photoresistors to the left and right side of the car. Essentially, if the left one received more light, I would spin the right wheel faster (to turn left), and vice versa for the right photoresistor.
Part of the assignment was a competition to see whose could complete the maze the fastest and my design won this competition.